
大同特殊鋼株式会社(社長:清水哲也)は、超微小発光窓径φ35μm、かつ 125℃の高温環境下での動作に対応する赤外点光源LED※1MED8P76Aを開発しました。2025 年12月よりサンプルの受注受付を開始します。 本製品を用いることで、ロボットの小型化で課題となる光学式エンコーダーの高分解能化および高温動作対応を実現し、機器全体の小型化に貢献します。
1.背景
近年、ものづくりの現場では人手不足を背景に協働ロボット※2などの産業用ロボットの普及が進んでおり、更なる小型化が求められています。
ロボットを小型化しようとすると、光学式エンコーダー(コードホイールと呼ばれる、スリットが刻まれた円盤状の部品をLED光で照らし、その透過パターンから回転軸の角度や速度を検出する位置センサー)のコードホイール径も小さくなり、スリット間隔が密になって読み取りが難しくなります。こうした状況では、隣のスリットにはみ出さないように確実に見分ける力=高分解能が求められます。これを満たすには、光のスポット径が小さい赤外点光源LEDが有効です。
また、ロボットを小型化するために、搭載するサーボモーターや光学式エンコーダーを密集化する傾向がありますが、密集させると内部の環境温度がこれまで以上に上昇してしまうため、モーター周辺部品の高温環境下での駆動安定性が求められるようになりました。
これらのニーズに応えるため、超微小発光窓径φ35μmで、125℃の高温環境下での動作に対応する赤外点光源LED:MED8P76Aを開発しました。
2.特長
- 超微小発光窓径φ35μmの小スポット径を実現。(図3、5)
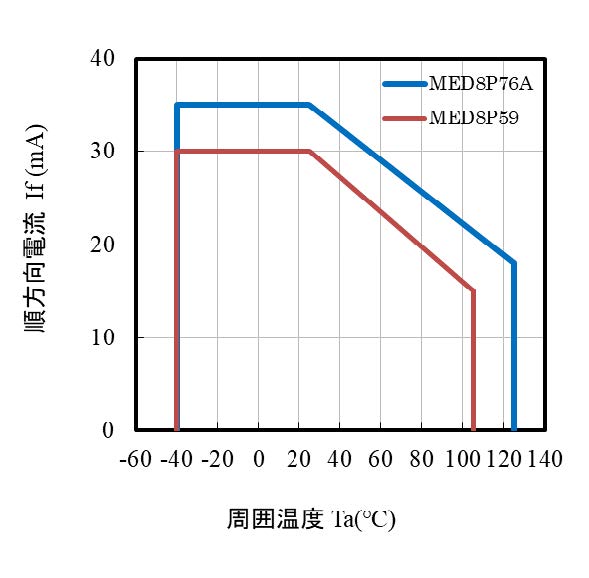
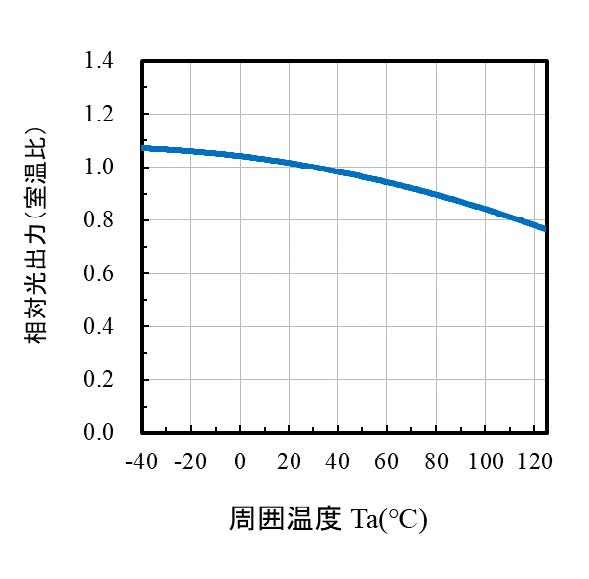
- 構造の工夫により発光窓周囲の局所的な電流集中を分散させ、LEDの光量劣化リスクを低減することで、125℃の高温環境下でも安定した動作を実現。(図11、12)
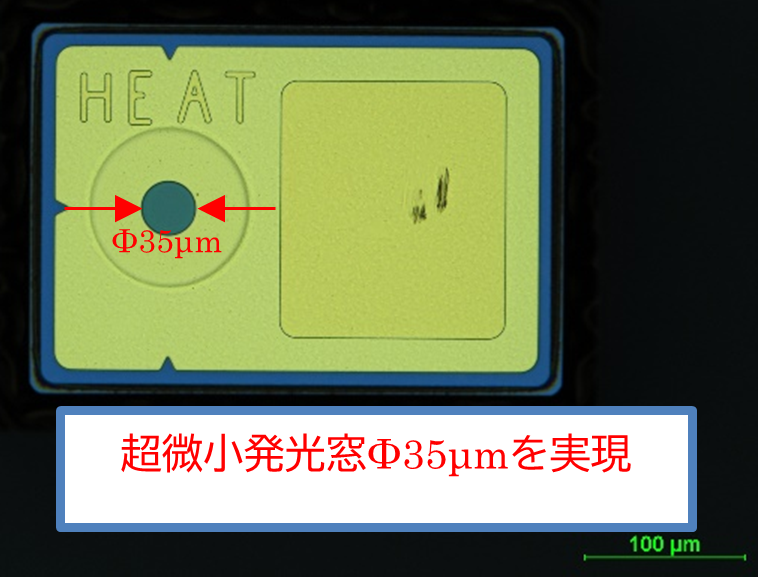
※LED 表面に4桁の番地を刻印することでウェハ内トレーサビリティ強化
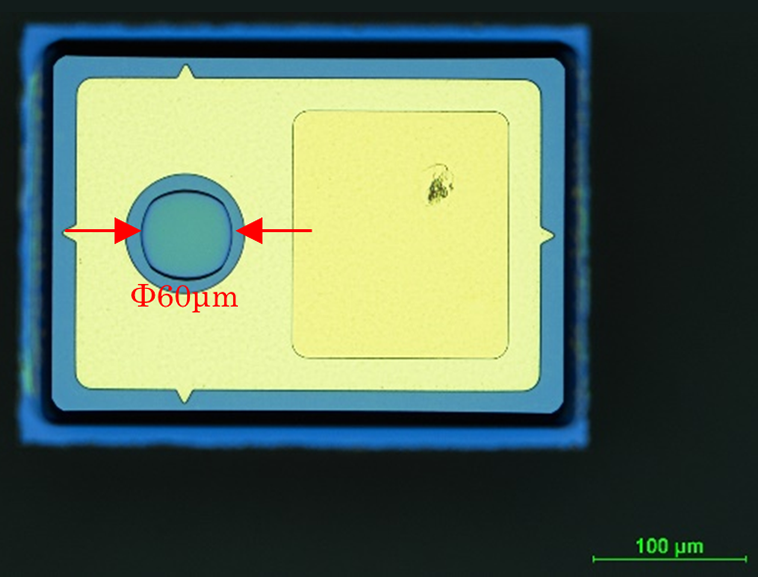
※当社φ60既存モデル
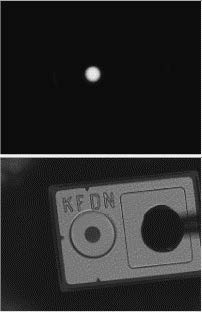
既存製品と比べ、発光が微小かつ光外周部のエッジがシャープ
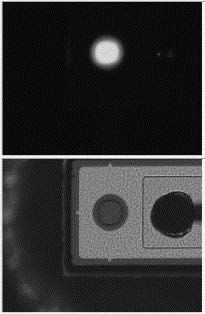
(当社φ60μm 既存モデル)
(MED8P59は当社φ35μm既存モデル)
(最大定格電流:35mA)
125℃環境下で1000時間の安定駆動を実現
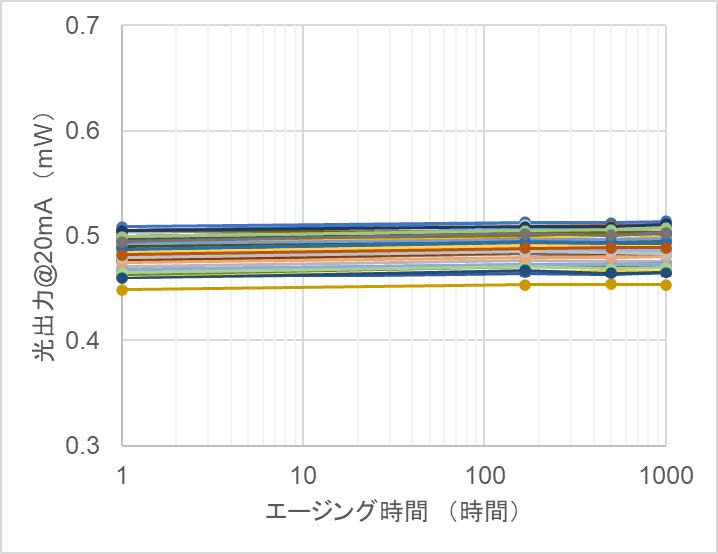
(n=45,125℃-DC35mA、ただし 125℃の定格電流は18mA)
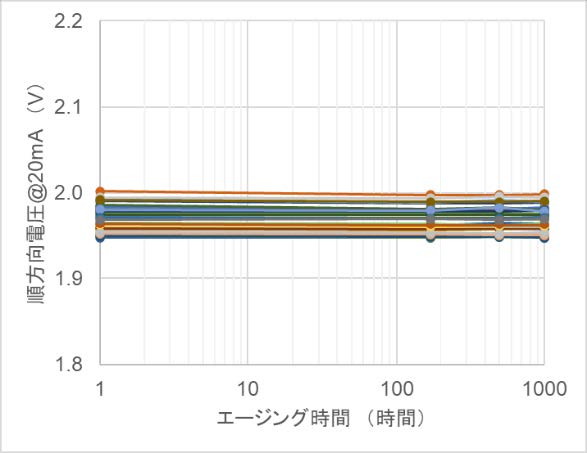
(n=45,125℃-DC35mA、ただし125℃の定格電流は18mA)
3.用途
最終アプリケーション:産業用ロボット、協働ロボット、工作機械、半導体製造装置
LED搭載アプリケーション:サーボモーター用光学式エンコーダー、光電センサー 等
用語説明
| ※1 点光源LED | LEDの上面が全面発光する面発光LEDとは異なり、スポット状の発光窓を持つLED。また、面発光LEDはダイの中央部にボンディングパッドがあり、その部分に影が生じるが、点光源LEDは発光窓と電極パッドが離れており、影が生じない。 |
| ※2 協働ロボット | 人と同じ空間で安全に作業ができる産業用ロボット。従来の産業用ロボットは安全柵で囲われたエリアで稼働するのに対し、協働ロボットは人との接触を検知して停止する安全機能を備えており、同じ作業空間で協力して働くことが可能。そのため、より繊細な制御が求められる。 |
| ※3 温度ディレーティングカーブ | 内部部品の過熱による損傷を防ぎ、製品の信頼性や寿命を向上させるための対策として、安全な動作範囲内で意図的に能力を制限することを温度ディレーティングと呼ぶ。通常はディレーティング曲線で温度と電流の関係が示される。 |
以上